Table of Contents
- GRASP Lab Facility Tour
- GRASP Lab Facility Snapshot
- GRASP at Levine
- GRASP at PERCH
- Research Support Facilities
- Additional GRASP Research Group Locations
GRASP Lab Facility Tour
GRASP Lab Facility Snapshot
Introduction
The General Robotics, Automation, Sensing and Perception (GRASP) Laboratory is a research facility within the School of Engineering and Applied Science at the University of Pennsylvania and housed within two locations on campus. The GRASP Lab’s mission is the creation and integration of knowledge through scholarly research, entrepreneurship and innovation with two facets:
• The design and delivery of robotics education and training of high caliber students to
become leaders in robotics.
• Basic research to advance our fundamental understanding of robots and intelligent
systems and technology development to be a catalyst for innovation and
entrepreneurship in robotics.
Currently, the GRASP Lab is comprised of 16 faculty members, 90+ PhD and 130+ Robotics Master’s graduate students and over 50 undergraduate students, along with numerous research staff either full time or in a collaborative presence within the lab, thus creating an interdisciplinary lab dedicated to research and education in robotic and intelligent systems. The faculty and students belong to several different SEAS departments, including Computer and Information Science, Mechanical Engineering and Applied Mechanics, and Electrical and Systems Engineering. The GRASP Lab with it’s two locations is able to provide both space for experiments and significant computing power for modeling and testing as well as electrical and mechanical manufacturing and prototyping machinery. In addition, GRASP’s diverse researchers provide expertise to fuse theory, simulation, and practice into working systems.
GRASP at Levine is a vibrant, collaborative environment that fosters interactions between students, research staff and faculty from the departments of computer and information science, electrical and systems engineering and mechanical engineering and applied mechanics. Doctoral students are trained in theory and practice and mentored to become leaders in research and education. The graduates of the interdisciplinary Master’s in Robotics program are uniquely equipped to face research and development challenges of the fast-growing robotics industry. Undergraduate students take introductory courses in robotics, pursue independent studies, and conduct research in robotics, computer vision and machine learning.
The GRASP Lab space is comprised of the following research space in the Levine Hall/Towne Building and interior office space:
Research/lab space (sq ft)
Levine 403 – 3,934.72 sq ft
Levine 457 – 1,286.19 sq ft
Levine 404 – 500.370 sq ft
Towne 170A – 869.58 sq ft
Towne 170B – 831.20 sqft
Office Space (sq ft)
Levine 461 – 269.31 sq ft
Levine 465 – 269.31 sqft
Levine 471 – 269.31 sq ft
Levine 475 – 269.31 sq ft

Figure 1: Levine Hall at the School of Engineering and Applied Science (SEAS) and where the main GRASP Laboratory along with smaller associated research labs are located.
Subsidiary Research Groups within the GRASP Lab at Levine
The GRASP Lab at Levine comprises three main subsidiary research groups: DAIR Lab, the Daniilidis Group, the Lifelong Machine Learning Research Group and the Sung Robotics Group (in alphabetical order).
The Dynamic Autonomy and Intelligent Robotics (DAIR) Lab is focused on the development of autonomous capabilities for both legged locomotion and robotic manipulation. The lab specializes in enabling robots to more quickly and safely interact with dynamic environments, encompassing algorithmic problems in modeling, control, planning, and learning . It is housed in a 860 square foot lab space within the Towne Building on Penn’s main campus. The space contains nine computing workstations for algorithmic and simulation development along with a small meeting area. For experimental testing, the lab also contains a Agility Robotics Cassie bipedal legged robot supported by a two-dimensional gantry system installed in the lab. Manipulation experiments are typically conducted in GRASP at Levine.

Figure 2: Agility Robotics Cassie bipedal legged robot supported by a two-dimensional gantry system installed in the lab.
The Daniilidis Group specializes in computer vision, both to better understand traditional vision problems and push the boundaries on vision for robotic platforms. As such, we maintain both compute and experimental infrastructure.
To support state of the art computer vision research, the lab maintains a many user SLURM cluster. Compute is serviced with 40 GPUs, 300 CPU cores, 1TB RAM. Persistent data storage is handled by 26TB NVMe and 160TB HDD through network attached storage. Real-time demos are supported by the 3x Nvidia TX-2 and 2x Nvidia Xaviers to run our current methods with FLIR machine vision cameras. In addition to traditional images and processing methods, our group supports neuromorphic hardware, both sensing and computation. On the sensing side, 2x DVS 346s and 2x DVS 240Cs from iniVation provide fully asynchronous event based vision. Our partnership with Intel allows us to bring low power asynchronous computation to event based vision with both physical and remote access to Loihi hardware.
Research robots for our group include a Kuka IIWA, Baxter, and Sawyer. These are complemented by high end desktops that can run the latest perception and planning models to Smart Aviary (shared project with Marc Schmidt’s group in the Biology department):
In the Smart Aviary, a flock of 15 cow birds is monitored with 10 hardware-synchronized FLIR computer vision cameras. The video is recorded for subsequent analysis, working towards fully automated, marker-less tracking and study of the bird’s behavior. Additionally, 24 Behringer microphones record the birds’ songs. The audio sampling of the microphones is synchronized to allow for time-difference-of-arrival algorithms to determine the 3d position of the singing bird. The data is recorded on a server at a shed next to the aviary.
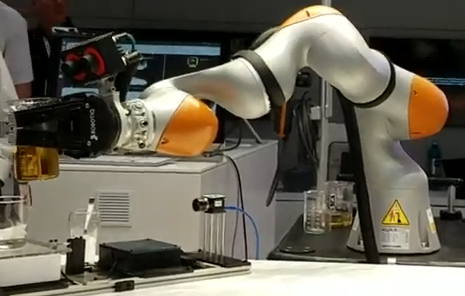
Figure 3: Kuka arm robot
The Lifelong Machine Learning Research Group develops autonomous systems that operate effectively in dynamic environments by learning a diverse variety of tasks and continually adapting over their lifetimes. The group’s research addresses fundamental issues of continual learning and transfer across diverse tasks, scalable knowledge maintenance, self-directed learning, adaptation to changes in the environment with guaranteed performance and safety, and interaction with end-users and other agents. These techniques are applied to problems in autonomous service robots and precision medicine.
For experimental evaluation, the group has access to several multi-GPU workstations and a fleet of autonomous service robots that were designed and built at Penn.

Figure 4: Penn autonomous service robot
Sung Robotics Group specializes in modeling and design of soft and semi-rigid robots. It is housed in an 860 sq ft dry lab space located on main campus and directly adjacent to SEAS’s main fabrication facilities. The lab contains multiple Linux and Windows workstations for work in simulation and design optimization, as well as workbenches for electronics and mechanical prototyping. A small (2 cu. ft.) motion capture system consisting of 8 Optitrack Flex 13 cameras is used for 0.1 mm precision tracking of deformation at up to 100Hz with 1 cm spatial resolution.
GRASP at PERCH: The Penn Engineering Research and Collaboration Hub (PERCH) is a brand new research facility housed within the Pennovation Center at the University of Pennsylvania. Our facility at PERCH brings researchers and students from across Penn together with collaborators from the private-sector tenants to promote innovative exchange, foster entrepreneurship and economic development and support impactful research and discovery. Pioneering researchers are building autonomous vehicles and robots, developing self-configuring humanoids, and making robot swarms a reality.
The GRASP Lab space is also comprised of the following research lab and machine shop space within the Pennovation Complex (in net sq ft):
Building 176
3rd Floor – 10,000 nsf
1st Floor (design and fabrication facility) – 1,326 nsf
Basement (OMAX water laser jet cutter) – 422 nsf
Building 197
Suite 100 – 752 nsf

Figure 5: The Pennovation Center is the home of the Penn Engineering Research and Collaboration Hub (PERCH).
Subsidiary Research Groups within the GRASP Lab at PERCH
The GRASP Lab at PERCH comprises four main subsidiary research groups: The Kod*Lab, the Kumar Robotics Lab, the Modular Robotics Lab (ModLab) and the Scalable Autonomous Robots Laboratory (ScalAR) (in alphabetical order).
Kod*lab is a locomotion-centric component of the GRASP lab that includes a large component of the 10,000 sq. ft. PERCH facility devoted to various legged robots. The specialized control infrastructure and interface to standard operating systems used to perform experiments with these machines has been documented in the refereed literature. At present there are two copies of Ghost Minitaurs, a Ghost Spirit (1st version), three copies of the XRHex hexapedal robot, and a variety of experimental legged systems (Inu, Delta Hopper, Jerboa) in various partial states of redesign, rebuilding or completion.
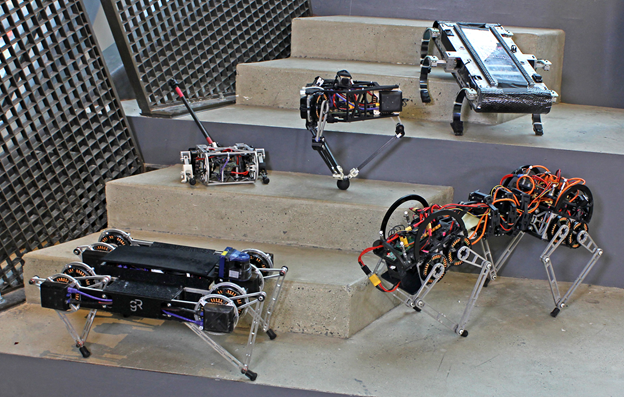
Figure 6.1: Selection from Kod*lab’s family of robots. Back row, left to right: Penn Jerboa, Delta Hopper, RHex. Front row, left to right: Minitaur, Inu.
Kod*lab maintains three X-RHex robots which are available to students and collaborators for short- or long-term research projects. Currently, two robots are kept on-site for student research and demonstrations, while one robot is loaned out to collaborators in aeolian science as part of the Legged Locomotion for Desert Research grant. One XRL robot is belonging to Kod*lab is on loan to CMU, for which the lab provides technical support. The lab also provides technical support for robots which have been purchased by other entities, including two X-RHex robots at the Museum of Science and Industry, one X-RHex robot at the Army Research Labs, and one XRL robot at Temple University.
The X-RHex robots, a group of biologically inspired hexapods that are small enough for a human to carry in a backpack (10kg) while offering a large, flat back (57 x 39cm) on which a diverse suite of sensors can be mounted, have demonstrated great capabilities for a variety of aeolian measurement tasks. During the past two years, RHex has been deployed for desert research missions with aeolian scientists in White Sands National Monument (New Mexico), the Jornada Experimental Range (New Mexico), Little Dumont Dunes (California), Oceano Dunes (California), and the Tengger desert (Ningxia province, China). We expect that in the near future RHex will operate more autonomously in harsh environments and help scientists solve more challenging problems.

Figure 6.2: X-RHex at White Sands, 2016

Figure 6.3: Ghost Minitaur™ is a medium-sized legged robot platform. Its high-torque brushless outrunner motors and specialized leg design let this machine run and jump over difficult terrain. High-speed and high-resolution encoders let the machine see the ground through the motors and adapt faster than the blink of an eye.
Ghost Minitaur is capable of running and turning at high speeds (2 m/s and 1 rad/s respectively) and can jump over small obstacles (up to 0.48m). The robot can even climb stairs, chain-link fences, and open doors (behaviors still under development). The battery lasts 6.75 hours when the robot is standing and 20 minutes when the robot is running at full speed.
“Sanditaur” is a Ghost Minitaur which has been modified for desert use by the addition of custom sand-proofing covers on the motors, which are normally exposed to the air, and larger feet. It is otherwise identical to a standard Minitaur.

Figure 6.4: Ghost Spirit™ is the update to Ghost’s medium-sized legged robot platform. Its high-torque brushless outrunner motors are combined with an integrated planetary gear system and invertible knee joint to provide better robustness and more capabilities. Added ab/aduction capabilities remove boundaries on the robot’s expected domain.
Ghost Spirit™ is a 12 DOF quadruped with ab/aduction capabilities, which promises to expand the previous Minitaur capabilities significantly. With updated motor controllers, lightly geared motor modules, updated IMU, and safety features the robot is much easier to use and is more robust. Its performance metrics should be comparable to those of Minitaur with higher battery life.
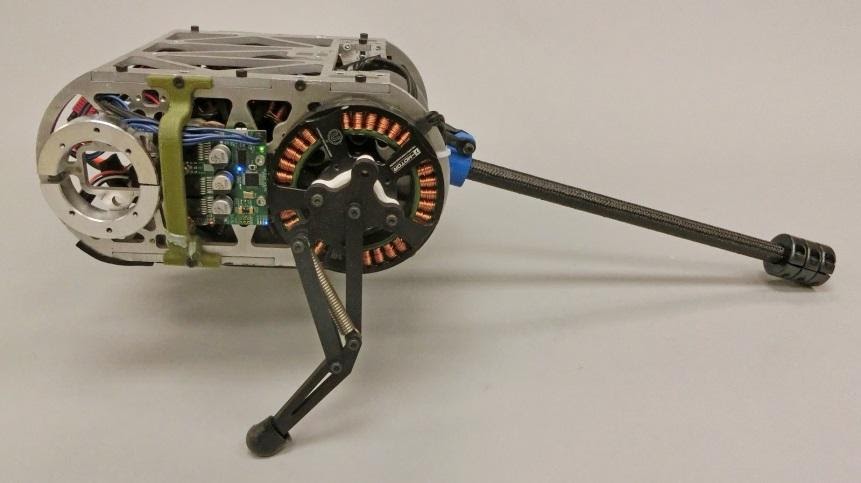
Figure 6.5: Jerboa is a 2.5Kg tailed bipedal robot with two passive-compliant underactuated legs, and a tail that can pitch as well as yaw. It can achieve varied modes of quasistatic and dynamic balance, enabling a broad range of locomotion tasks including sitting, standing, walking, hopping, running, turning, leaping, and more. It is used as a vehicle for research on controls, bio-inspiration, and mechanisms.
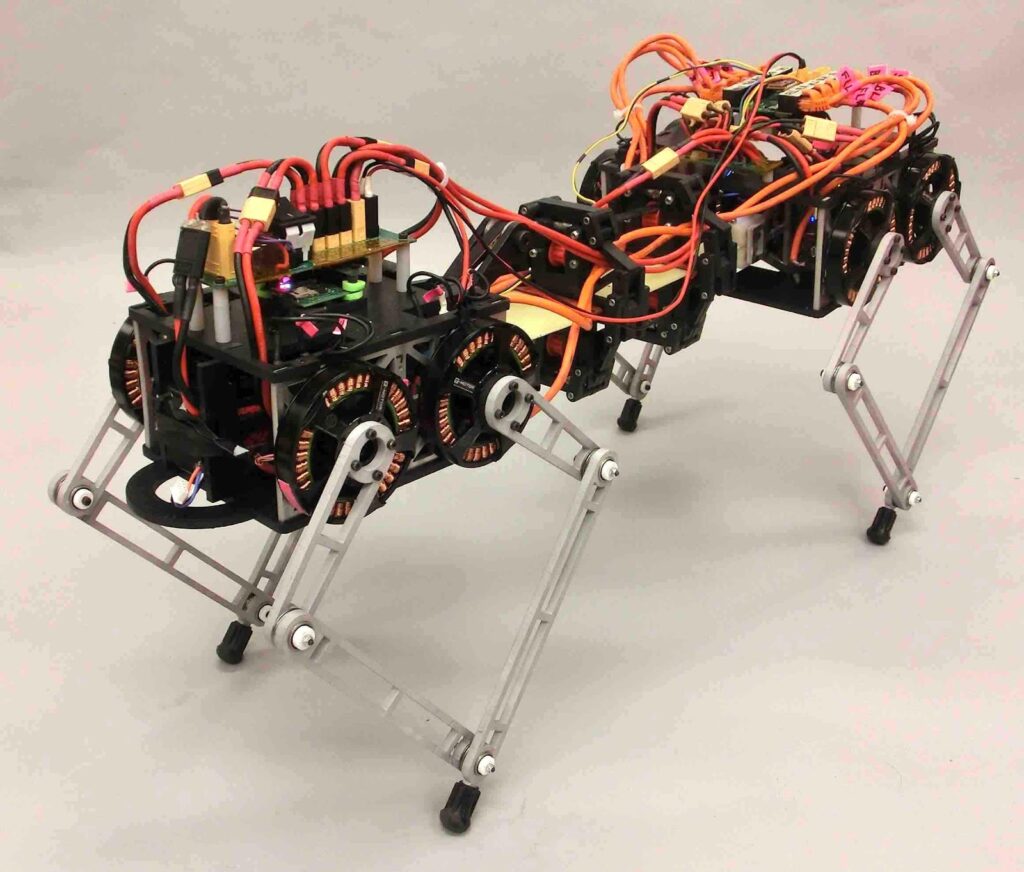
Figure 6.6: Inu is a quadrupedal robot equipped with a parallel elastic-actuated spine mechanism, allowing it’s back to bend in a similar manner to many animals such as squirrels and dogs. The Inu robot serves as a testbed to investigate the role that spine bending plays in agile legged locomotion for tasks such as running and leaping.
The TOBI (Teaching-Oriented Biologically-Inspired) Robot is a low-cost legged robot platform designed to be easy to use and provide a compelling user experience. After several design iterations the platform cost has come down to just under $250 and we are aiming at a $200 final target for a machine that could be affordable within the secondary school budget, yet still offering good dynamic performance due to its 25 W/kg power density and approximate 4-hour battery life.
The robot runs on an Arduino system and is meant to be completely self-assembled and self-soldered. The design is highly modular, with the six legs being swappable with arms, wheels or a combination of them. TOBI can be expanded to utilize all Arduino pins to include sensors, external motors and other electronic components via its onboard breadboard.
Delta Hopper is power-autonomous one-legged robot that uses direct drive motors to power hopping in three dimensions. By instantiating one of the most basic templates of legged locomotion, the spring loaded inverted pendulum (SLIP), the Delta Hopper can be used to test balance control algorithms before constructing more complex, multi-legged robots. It also allows for research into mechanism design for building high degree-of-freedom joints for other robots.
Kumar Robotics Lab is equipped with powerful workstations and servers to facilitate simulation, experimentation, and data-processing. The lab maintains a large number of aerial robots, including commercially available platforms, as well as those developed in-house. The commercially available robots include a fleet of fifteen Qualcomm Flight drones, six AscTec Hummingbirds as well as several Autel, DJI, and Skydio platforms. MRSL is also actively developing several aerial platforms to suit particular tasks with demanding requirements. All robots are equipped with different onboard sensing and computing modules, permitting autonomous operation both indoors and outdoors.

Figure 7.1: UAVs being developed at MRSL: the Tiercel (left) is a palm-sized UAV designed for use in robust, collision-resistant swarms; the Emu (middle) is a general-purpose platform optimized for long flight times and low vibrations for stable flight; the Inspot (right) is a platform designed for inspection of the dark, wet, and featureless environments inside the penstocks of hydroelectric dams.
MRSL also houses several types of wheeled and legged robots to facilitate ground-based operations. These include four Ghost Vision 60s, three Clearpath Jackals, and six Scarab robots. These robots serve as convenient research platforms to test new state-of-the-art algorithms, and the different modalities that these UGVs offer allow for various indoor, outdoor, and even underground experiments. Finally, the lab contains the Fetch Mobile Manipulator with the Freight Mobile Robot Base to facilitate mobile manipulation research.
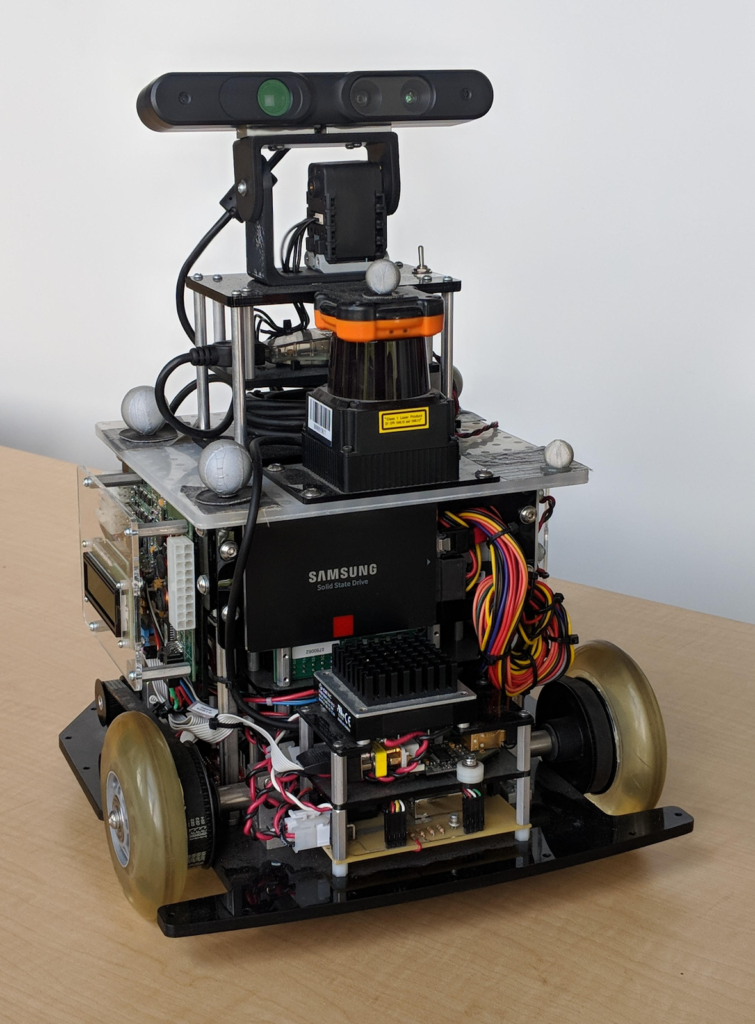
Figure 7.2: The Scarab robot is a research platform developed in-house to serve as a testbed for large multi-robot teams. It contains a powerful CPU to facilitate real-time planning, state estimation, and mapping algorithms.
ModLab includes lab space used for land running, climbing, digging, self-assembly and flying experiments. There are a large variety of modular robot systems currently used and reused in a variety of experimental systems. The lab has approximately 100 CKBot modules of the V1.1 another 100 CKbot V1.2 modules, plus another dozen prototypes of specialized modules that include grippers, fast dynamic modules, continuous modules, smart-camera modules etc. Integral to this lab are electronics prototyping, soldering and SMD re-work stations. We have developed a shape deposition modeling capability-combining CNC machining with rapid formation of polyurethane resins including embedded actuators, sensors and computation.

Figure 8.1: A Modlab SMORES (Self-assembling MOdular Robot for Extreme Shapeshifting) is capable of rearranging its modules in all three classes of reconfiguration; lattice style, chain style and mobile reconfiguration.
ScalAR (Scalable Autonomous Robots Laboratory) developed and maintains the multi-robot Coherent Structure Testbed (mCoSTe) – the first marine multi-robot testbed capable of creating controlled ocean-like flows. The mCoSTe consists of 10 Autonomous Surface Vehicles (ASVs) and three experimental flow tanks: a Low Reynolds number (LoRe) Tank, a High Reynolds number (HiRe) Tank, and a Multi-Robot (MR) Tank. The LoRe, HiRe, and MR Tanks are respectively 10 cm2 x 2 cm, 3600 cm2 x 30 cm, and 10.8 m2 x 1 m in size. Flow fields generated in each of these tanks can be tracked using particle imaging velocimetry (PIV) and/or particle tracking velocimetry (PTV). The flows in the mCoSTe tanks are patterned after common ocean circulation models that provide a kinematic description of both time-independent and time-varying flows and allows the explicit modeling of uncertainty and noise. The mCoSTe ASVs include 100 g vehicles equipped with inertial measurement units (IMUs) and wifi radio capabilities and 110 g vehicles equipped IMUs, wifi, and onboard flow sensors. Localization for the ASVs is provided by an external motion capture system.
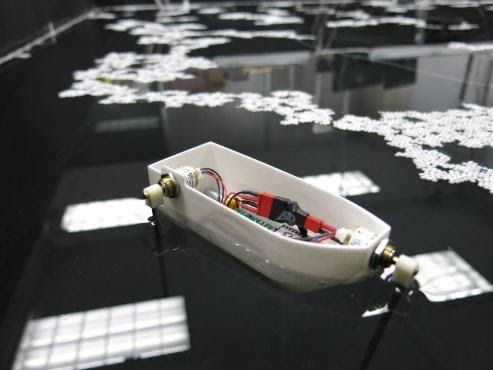

Figure 9.1: The mCoSTe ASVs.
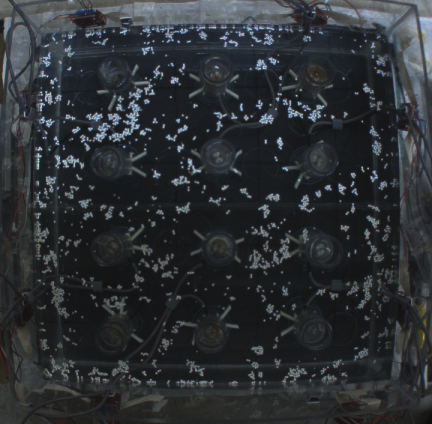
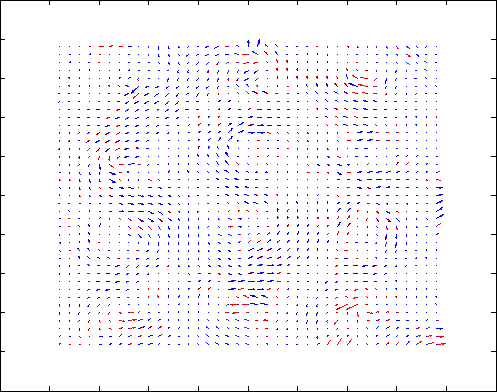
Figure 9.2: (Left) Overhead view of the experimental setup of the HiRe flow tank with 12 driven cylinders for creating gyre-like flows. (Right) PIV extracted surface flow field.
ScalAR also houses one Clearpath Robotics, Inc. Heron autonomous surface vehicle (ASV) equipped with GPS, onboard camera, IMU, and bathymetry sensor.
Research Support Facilities
To assist GRASP faculty, staff and students in their research at PERCH, there are significant resources available in the Pennovation Center. These include various open common areas throughout the building to provide a friendly and modern working environment. Specific to PERCH, there are computer workstations and both indoor and outdoor testing facilities. Also integral to the GRASP Lab at PERCH is the Design and Fabrication facility that is housed on the first floor of the Pennovation Center which allows for prototype development and manufacturing.
Workstations
The GRASP Lab at PERCH features a common area with workstations that can house approximately sixty researchers and students in a friendly and modern working environment.

Figure 10: Modern workstations with ample lighting, power and networking capabilities are available for PERCH researchers on the 3rd floor of the Pennovation Center.
Indoor Testing Area
This consists of a 88 ft. L x 22 ft. W x 15 ft. H indoor area used for experimentation with unmanned aerial vehicles, ground wheeled robots and humanoids. This space is instrumented with 20 high-resolution Vicon Advantage V16 motion capture cameras (https://www.vicon.com/products/camera-systems/vantage) that allow motion capture at over 100 Hz with mm accuracy.

Figure 11: PERCH indoor testing area that allows experimentation with unmanned aerial vehicles, ground wheeled robots and humanoids
Outdoor Testing Area
This consists of a 100 ft. L x 50 ft. W x 50 ft. H outdoor netted area instrumented with an all-weather motion capture system comprised of 28 high resolution Qualisys Opus 700+p cameras (http://www.qualisys.com/cameras/oqus/). This space allows testing of aerial and ground vehicles in an outside laboratory setting.

Figure 12: PERCH outdoor testing area that allows experimentation with aerial and ground vehicles and includes a 28 camera all weather motion capture camera system.
PERCH Design and Fabrication Facility
Integral to the GRASP Lab at PERCH is the Design and Fabrication Facility that is located on the first floor of the Pennovation Center. With a unique blend of conventional design and fabrication machinery along with rapid prototyping equipment, this facility allows development of quick turnaround prototypes or final end products. Technical staff are available to assist PERCH researchers by providing engineering and design assistance as well as prototype development, general fabrication and assembly. The facility size is 66 ft. L x 22 ft. W and includes various types of fabrication equipment, a detailed description of these resources follow.
Additive manufacturing equipment includes FDM 3D printing capabilities for fast part manufacturing and prototyping. There are two systems available: Stratasys FORTUS 380mc and Stratasys UPrint SE Plus.
| Stratasys FORTUS 380mc Build envelope of 14 in. x 12 in. x 12 inLayers thicknesses of 0.005 in. thru 0.013 inMaterials that can be printed include ABS, ASA, nylon, or polycarbonate.Part accuracy of +/- 0.005 in. Stratasys uPrint SE PlusBuild envelope of 8 in. x 8 in. x 6 inLayers thicknesses of 0.010 in. thru 0.013 inMaterial that can be printed is ABSPlus. |  Figure 13.1: Stratasys FORTUS 380mc Figure 13.1: Stratasys FORTUS 380mc  Figure 13.2: Stratasys uPrint SE Plus Figure 13.2: Stratasys uPrint SE Plus |
There are two CO2 laser cutting systems available for 2D cutting and engraving. These systems allow cutting of various plastics as well as engraving on plastics or metal. There are two systems available: ULS PLS 6.75 Laser Platform and ULS PLS 4.75 Laser Platform. Both have the same wattage ratings but vary in the size of the build envelope.
| ULS PLS 6.75 Laser PlatformBuild envelope of 32 in. x 18 in. x 9 inPower 75 WattMaterials that can be cut include ABS, Acrylic, and MDF.Laser cutting kerf of 0.007 in. ULS PLS 4.75 Laser PlatformBuild envelope of 24 in. x 18 in. x 9 inPower 75 WattMaterials that can be cut include ABS, Acrylic, and MDF.Laser cutting kerf of 0.007 in. |  Figure 13.3: ULS PLS 6.75 Laser PlatformFigure 13.4: ULS PLS 4.75 Laser Platform Figure 13.3: ULS PLS 6.75 Laser PlatformFigure 13.4: ULS PLS 4.75 Laser Platform |
An Abrasive Waterjet Cutting System will be available for parts manufacturing by the Summer of 2017. This compact high precision Omax 2626 machine will allow various types of materials to be cut in varying thicknesses.
Omax 2626 JetMachining CenterBuild envelope of 29 in. x 26 in. x 8 in30 HP pumpMaterials that can be cut include plastics, aluminum, steel, etc. at various thicknesses.Accuracy +/- 0.001 in. |  Figure 13.5: Omax 2652 JetMachining Center Figure 13.5: Omax 2652 JetMachining Center |
Conventional machining equipment includes: TRAK bed mill with CNC or manual capabilities, TRAK lathe with CNC or manual capabilities, and a Victor manual knee mill.
TRAK Bed mill with ProtoTRAK CNC controllerTravels X, Y and Z: 31 in. x 16 in. x 23.5 in.Table Size: 49 in. x 9 in.3 HP spindle motor.R8 spindle taper.ProtoTRAK control with 2 or 3-axis CNC, 3-axis DRO mode.Can run conversational language, G-code, or CAM software. |  Figure 13.6: TRAK DPM SX2P bed mill with CNC or manual capabilities. Figure 13.6: TRAK DPM SX2P bed mill with CNC or manual capabilities. |
TRAK Lathe with ProtoTRAK CNC controller16 in. swing over bed, 30 in. between centers.Operate in CNC or manual mode.ProtoTRAK control with 2 axis CNC, 3-axis DRO mode.Can run conversational language, G-code, or CAM software. |  Figure 13.7: TRAK TRL 1630SX lathe with CNC or manual capabilities. Figure 13.7: TRAK TRL 1630SX lathe with CNC or manual capabilities. |
Victor Knee MillTravels X, Y and Z: 40 in. x 16 in. x 16 in.Table Size: 54 in. x 10 in.3 HP spindle motor.R8 spindle taper.2-axis DRO.Power feed on X axis. |  Figure 13.8: Victor JF-4VS Vertical Knee Mill. Figure 13.8: Victor JF-4VS Vertical Knee Mill. |
Assortment of general fabrication machines include: vertical band saw, horizontal band saw, bench top drill press, free standing drill press, belt sander, and pedestal grinder. An assortment of hand tools and measurement instruments are also available for use.
DoALL Veritcal BandsawThroat, band to column: 20 in.Max. work height: 13 in.Variable speed: 30 to 320/550 to 5,500 fpm.Table size: 26 in. x 26 in. |  Figure 13.9: DoALL 2013-V3 Vertical Bandsaw. Figure 13.9: DoALL 2013-V3 Vertical Bandsaw. |

Figure 13.10: JET 8 in. x 14 in. Horizontal Bandsaw

Figure 13.11: Dake Drill Press and JET Belt Sander
Additional GRASP Research Group Locations
The Nanorobotics Lab is focused on state of the art fabrication and metrology for robots too small to see by eye. Our lab is 800 square feet, housed in the Singh Center for Nanotechnology. Central to the lab area are two microscope probe stations, both specifically designed for testing small scale robots. One probe station is built around an upright microscope and designed to support in situ electrical and mechanical probing. It has two computer-controlled micromanipulators, in-line perfusion pumps, and manifold heaters to support biological cells. The second probe station is designed for light-based manipulation and control. Built around an inverted microscope, it features an optical trap, multiple laser sources for illumination under different wavelengths of light, and a liquid crystal spatial light modulator. In addition, we have a range of other microscale tools including low noise amplifiers, multi-axis Helmholtz coils, microinjectors, and two wet-chemistry hoods. Our lab is located down the hall from the Quatrone nanofabrication facility, a 10,000 square foot cleanroom where we carry out our in-house fabrication work.
The Rehabilitation Robotics Lab is located at Penn Medicine@Rittenhouse location at 1800 Lombard Street, Philadelphia, PA 19146. It is also a part of the Pennsylvania Institute for Rehabilitation Medicine. The lab is about 1400 square feet and is dedicated to the design, development and therapeutic use of novel, affordable, intelligent robotic/mechatronic assistants with six workstations. Each workstation can access UPenn network and Penn Medicine’s network.
The lab has several robots and various equipment: HapticMaster Robot, 2 iRobot Create V1, Kobuki robot base, Vgo mobile telepresence robot, Mantarobot, NAO, Baxter and other sensing equipment such as accelerometers, 2 DOF tilt sensor, force sensors, etc.
Custom robotic systems developed are: ADLER (6 degree of freedom robot), bi-ADLER (Two 8 degree of freedom robots), Lil’Flo (mobile socially assistive telepresence robot), electromechanical systems: Haptic TheraDrive, Rehab CARES, TheraDrive, BiAS, Grasp Glove and fMRI safe devices such as a glove, orthosis and a hand bike, non-robotic diagnostic systems: PANDA Toy Gym.
The lab houses 6 desktops and 5 laptops dedicated for development use with office spaces for graduate students. The lab houses several computers with the software needed to perform needed data collection and analyses: Matlab, Simulink and relevant tool boxes such as TargetPC), Microsoft visual studio.net, etc.
The lab has small electronics prototyping equipment such as soldering mechanical prototyping equipment such as makerbot 3D printer for rapid prototyping of small parts.
Dr. Johnson currently supervises a research coordinator and graduate and undergraduate students from multiple departments in engineering, bioengineering and robotics. Her lab includes two locked cabinets to protect research source data, and has network access via hard-wire or wireless connections.

Figure 14: Panda Toy Gym