1 – Fast autonomous UAV flight in GPS-denied conditions :00, :30
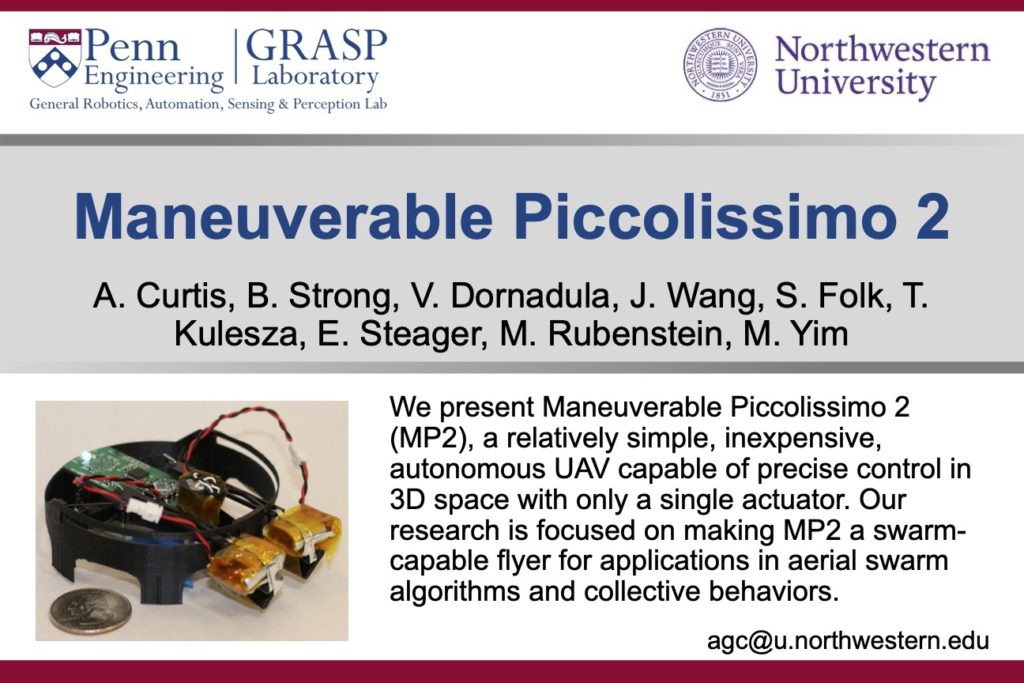
2 – Maneuverable Piccolissimo 2 :15, :45
3 – Decentralized Planning with Shared Semantic Representation for Multiple Robots :00, :30

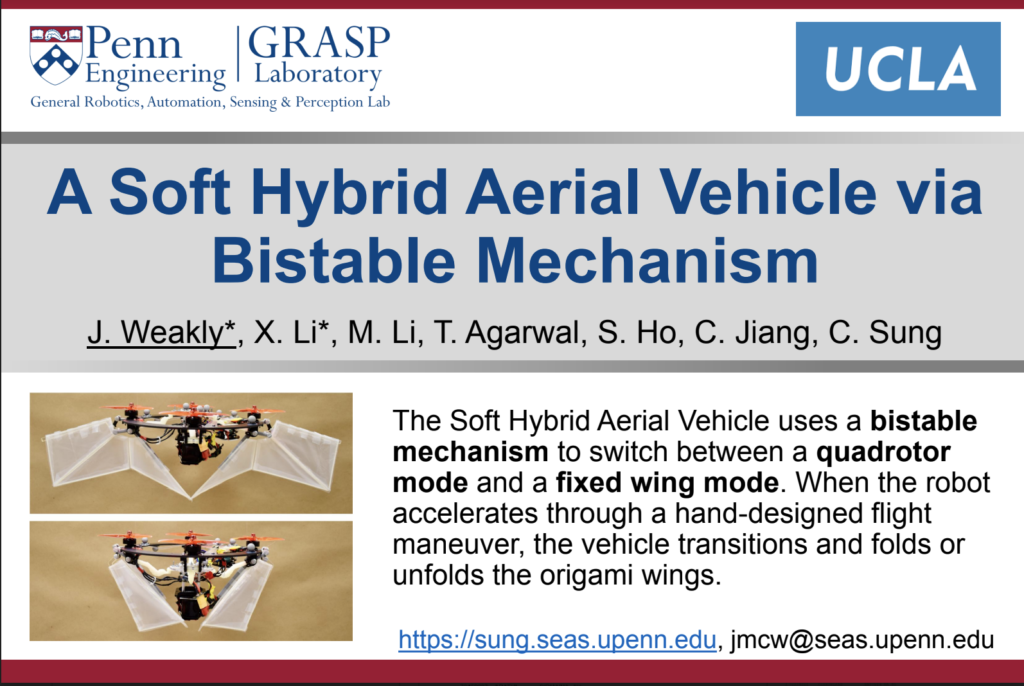
4 – Soft Hybrid Aerial Vehicle via Bistable Mechanism
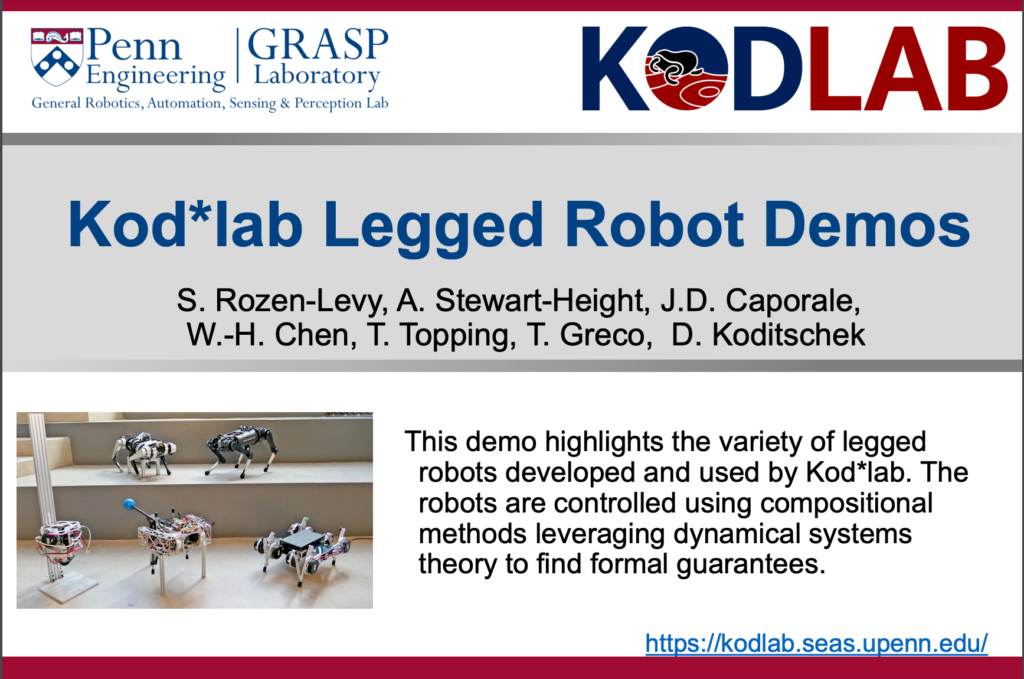
5 – Kod*lab Legged Robot Demos – May 23 only
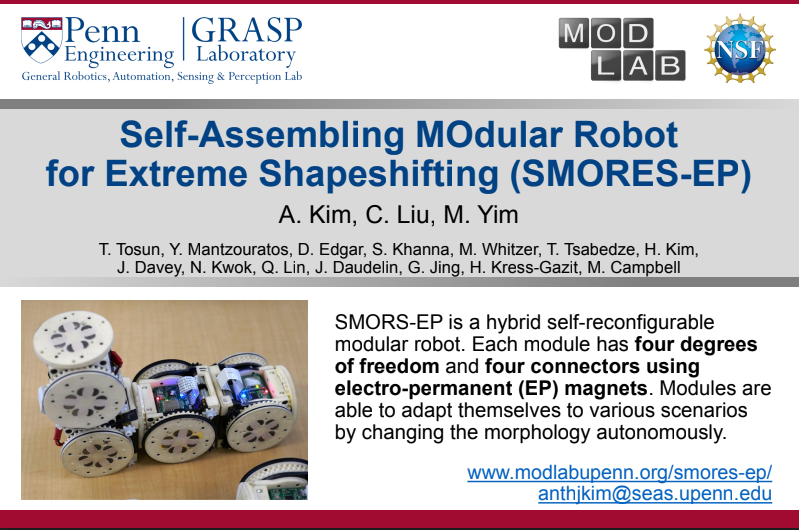
6 – Self-Assembling Modular Robot for Extreme Shapeshifting (SMORES-EP)
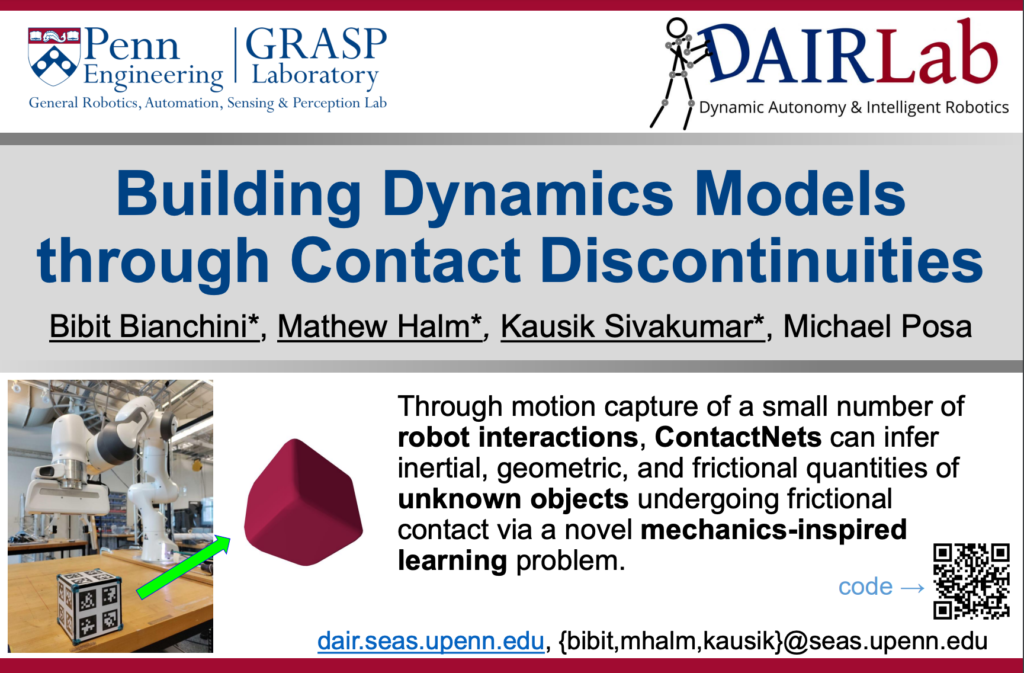
7 – Building Dynamics Models through Contact Discontinuities
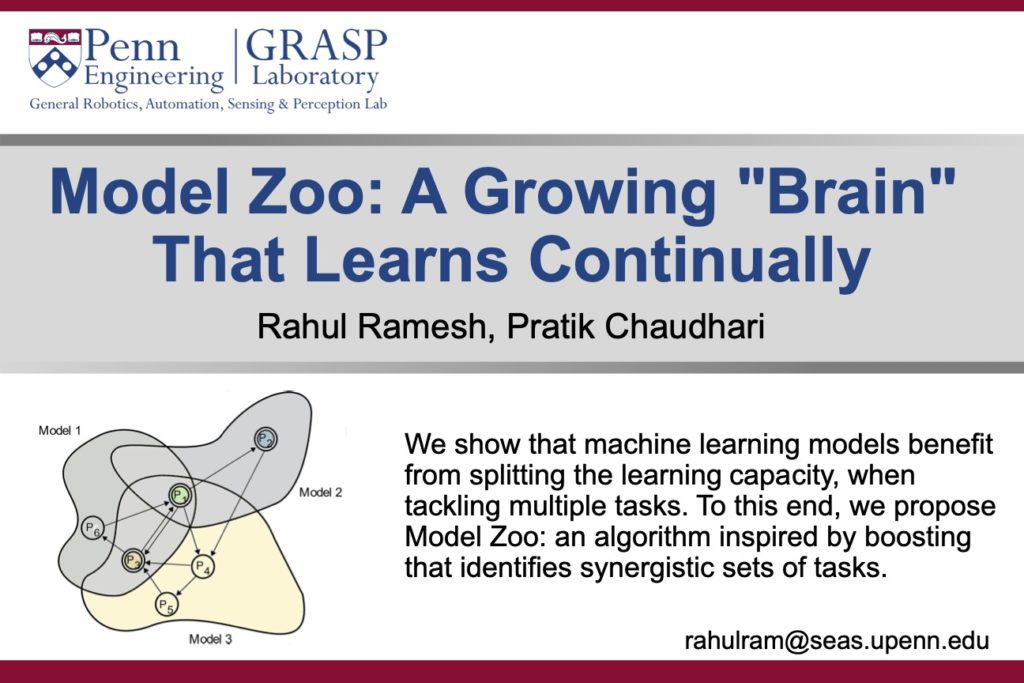
8 – Model Zoo: A Growing “Brain” That Learns Continuously
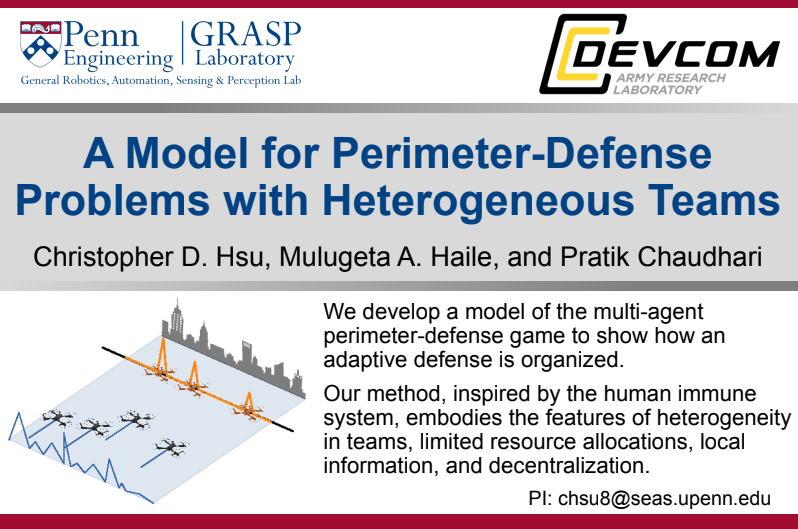
A Model for Perimeter-Defense Problems with Heterogeneous Teams
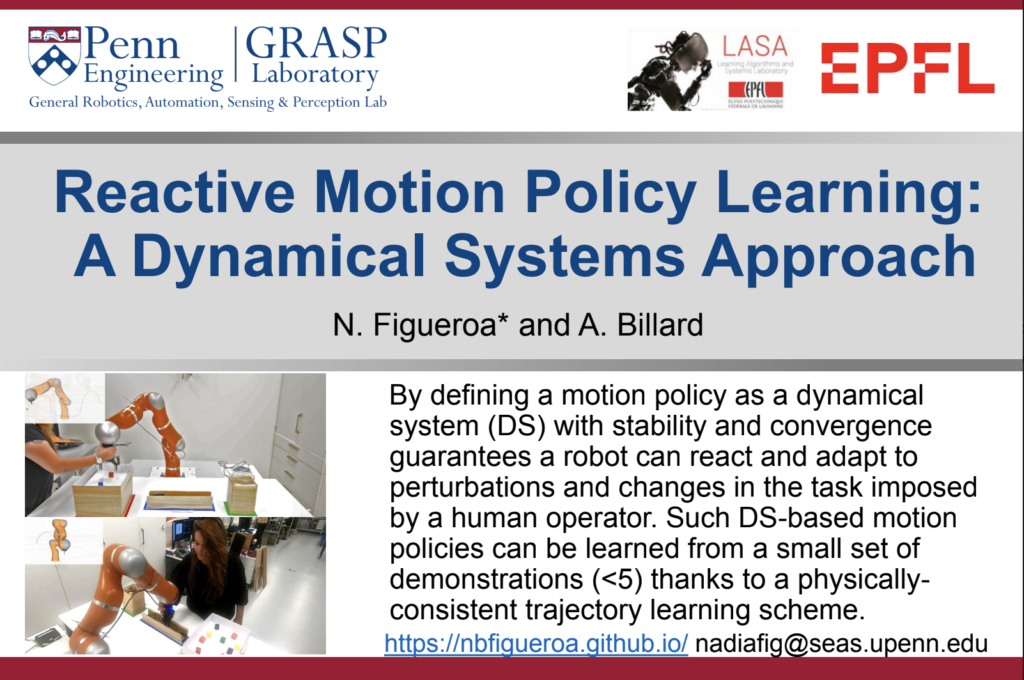
9 – Reactive Motion Policy Learning: A Dynamical Systems Approach
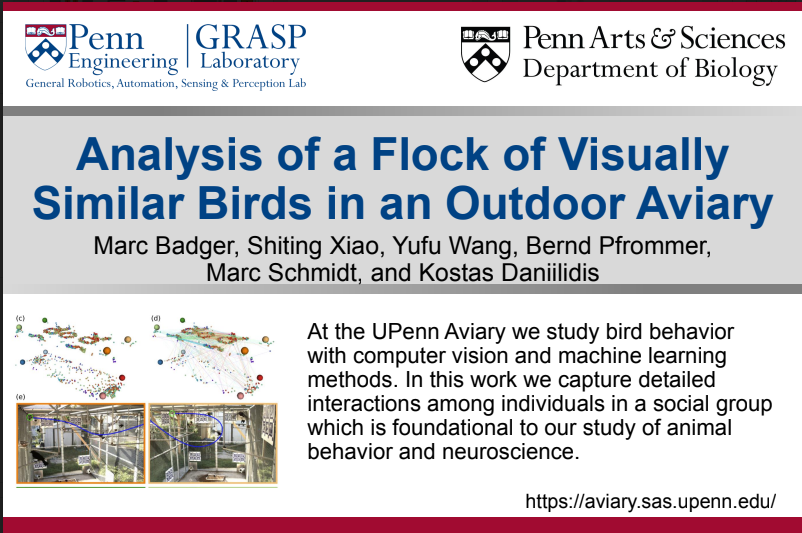
10 – Analysis of a Flock of Visually Similar Birds in an Outdoor Aviar
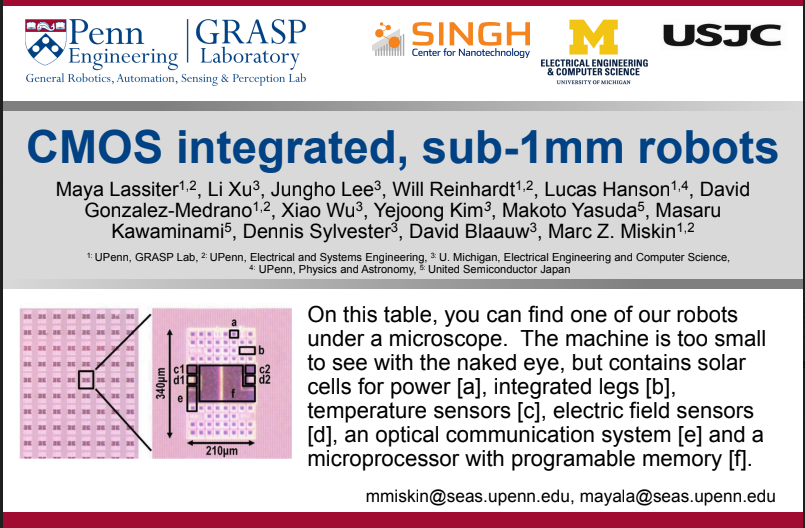
11 – CMOS Integrated, Sub-1mm Robots
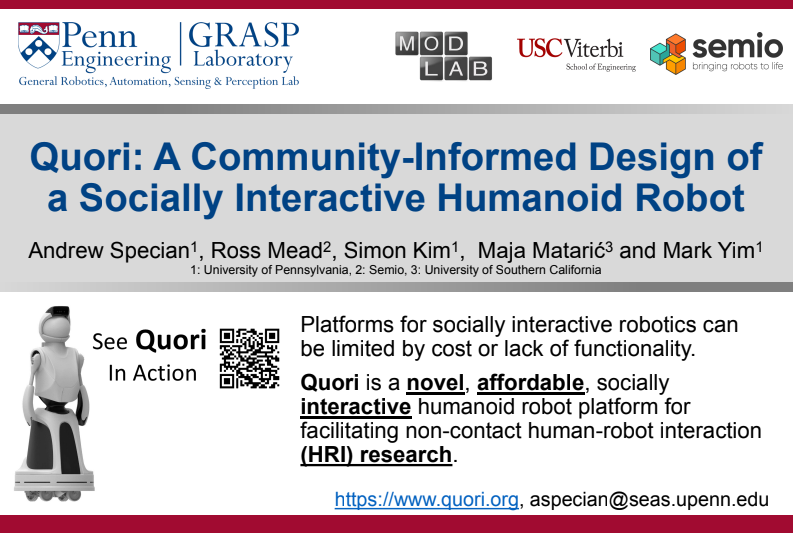
12 – Quori: A Community-Informed Design of a Socially Interactive Humanoid Robot :00, :15, :30,:45
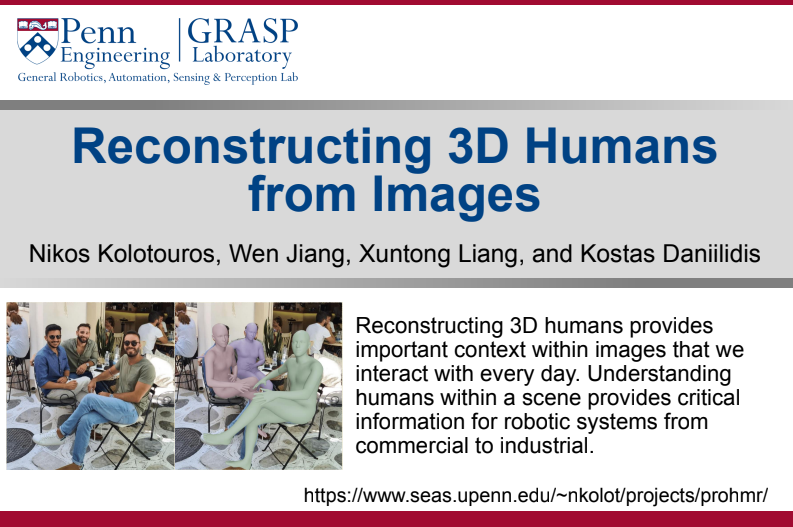
13 – Reconstructing 3D Humans from Images
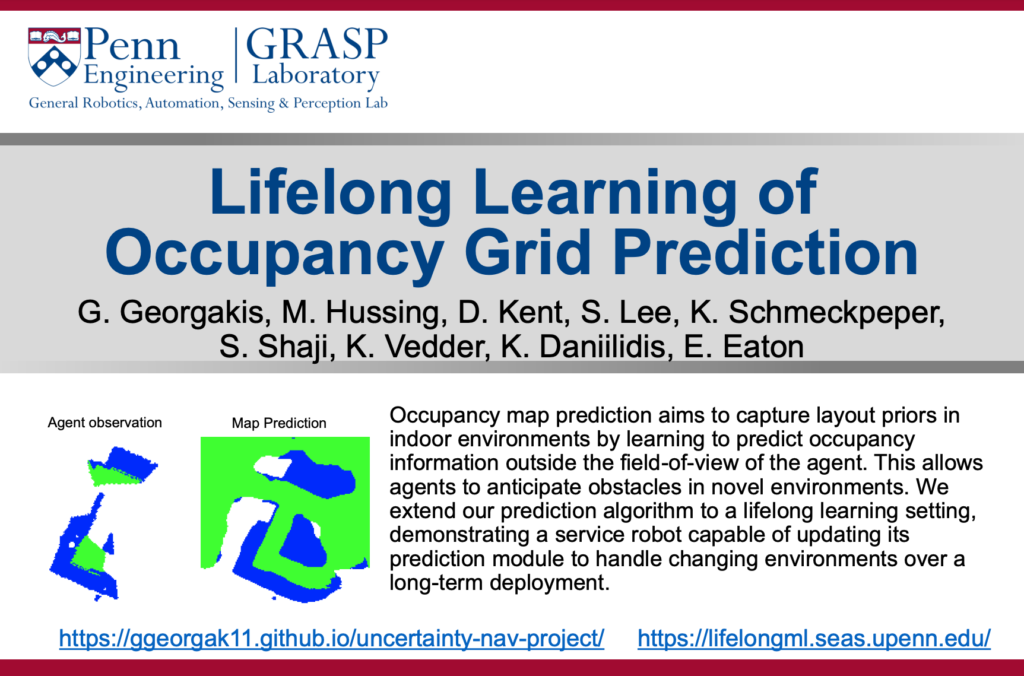
14 – Lifelong Learning of Occupancy Grid Prediction
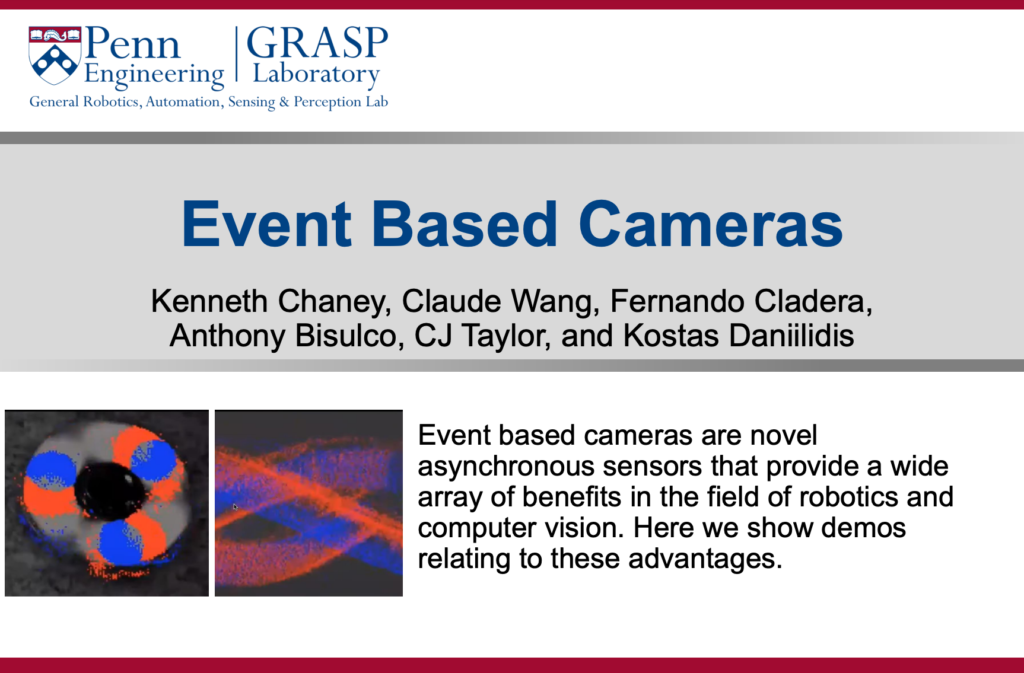
15 – Event Based Cameras
16 – Safety-critical Learning, Optimization, and Control
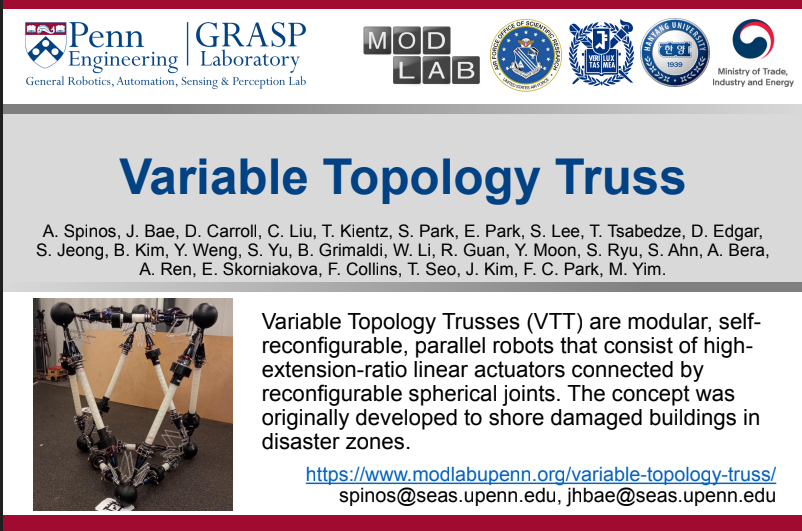
17 – Variable Topology Truss
18 – Cassie Locomotion Controllers

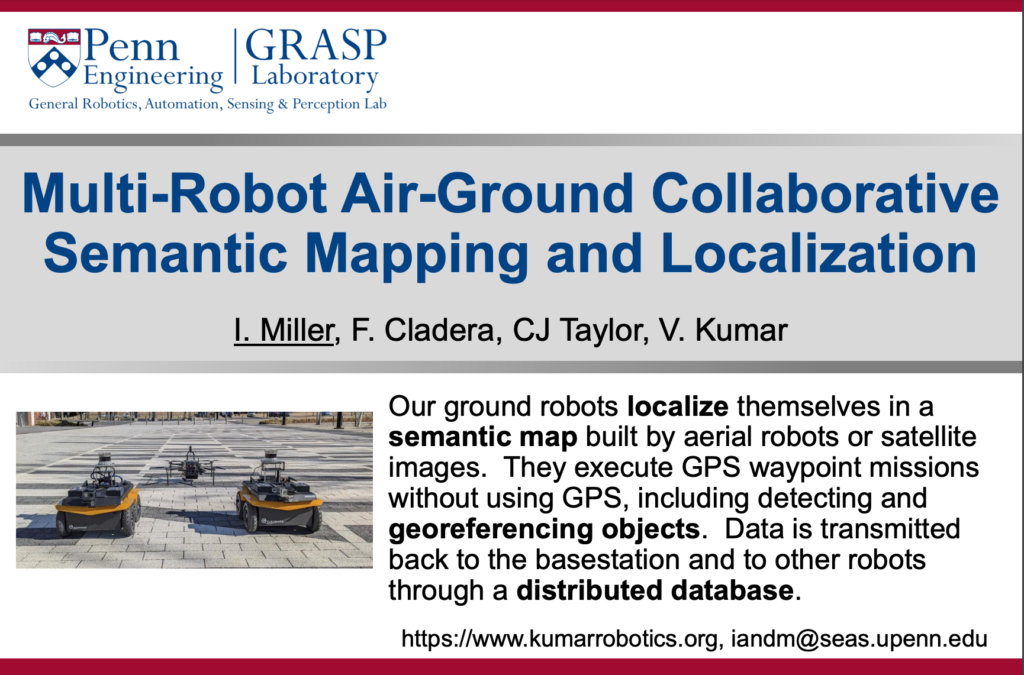
19 – Multi-robot Air-ground Collaborative Semantic Mapping and Localization :15, :45
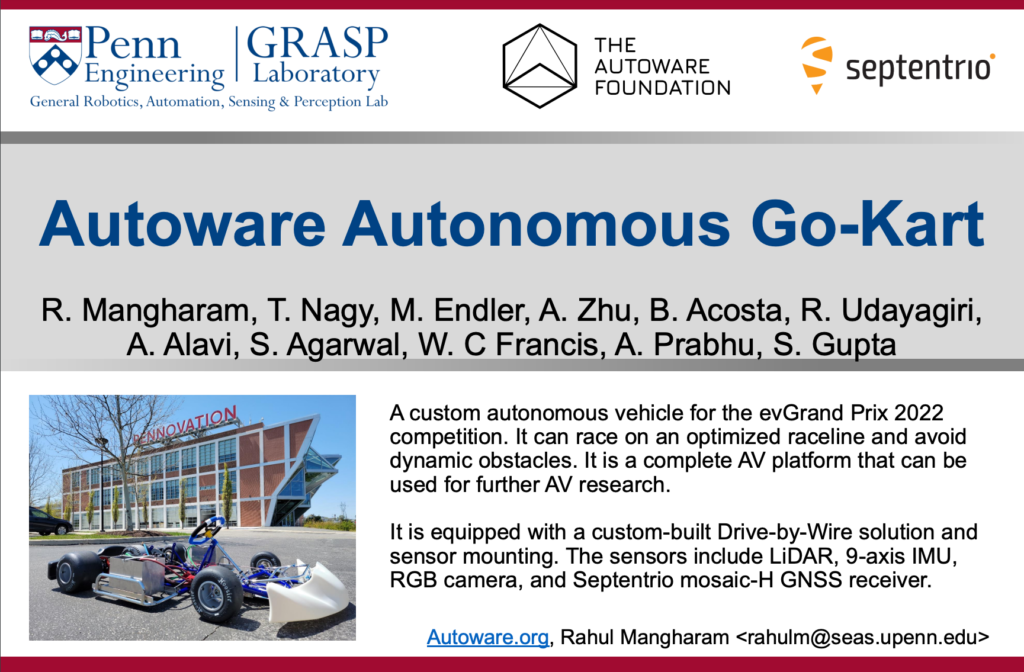
20 – Autoware Autonomous Go-Kart :00, :30
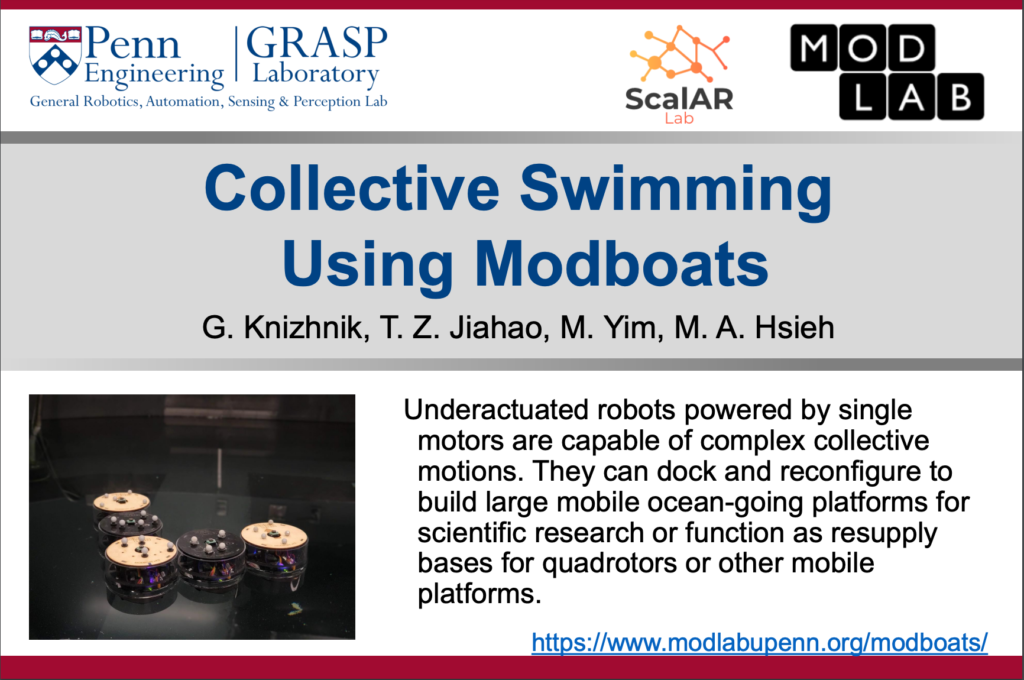
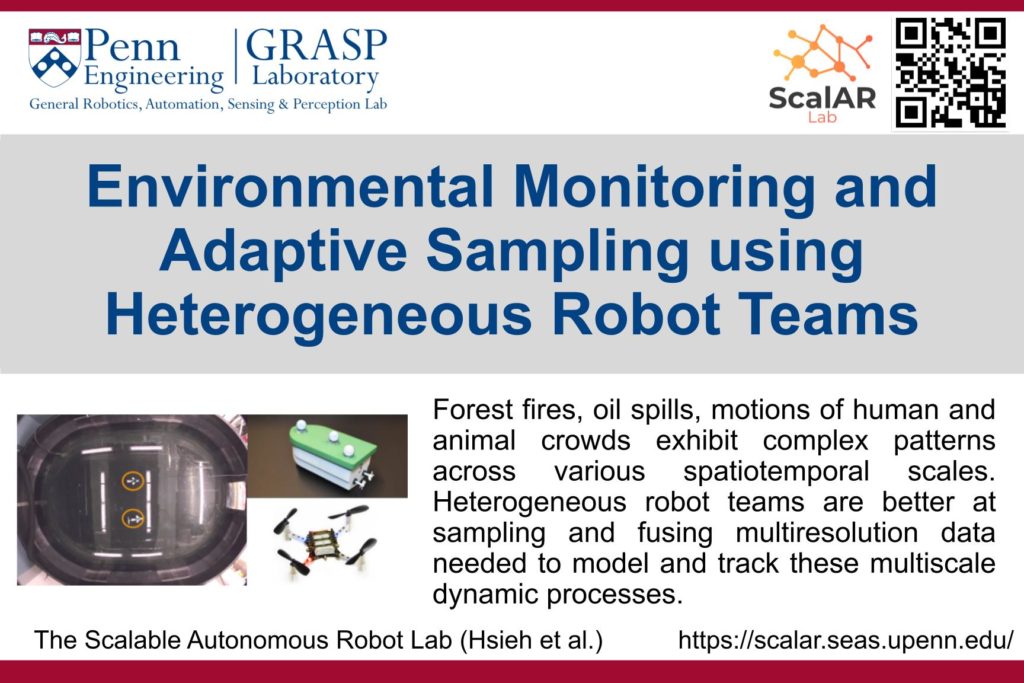
21 – ScalAR Lab Demos :00, :15, :30, :45
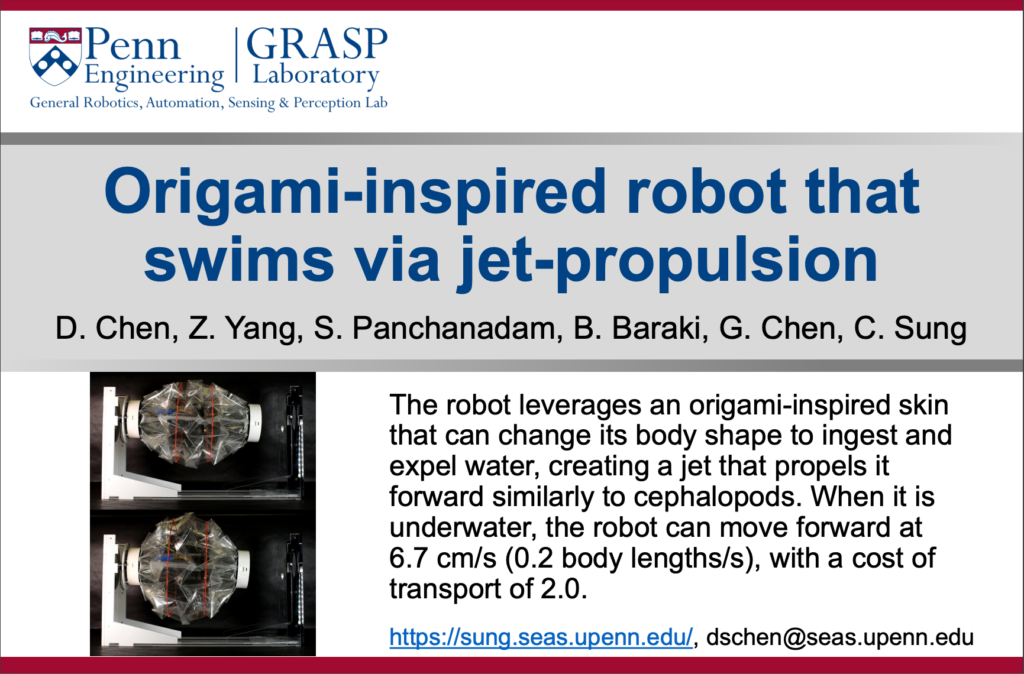
22 – Origami-inspired Robot that Swims via Jet Propulsion
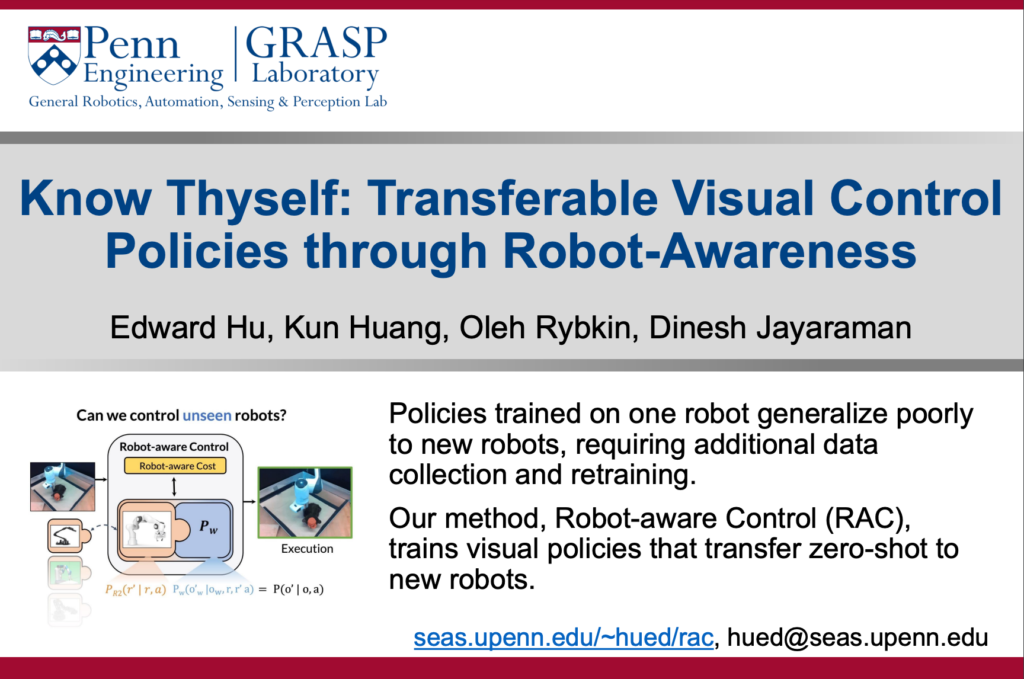
23 – Know Thyself: Transferable Visual Control Policies through Robot-Awareness
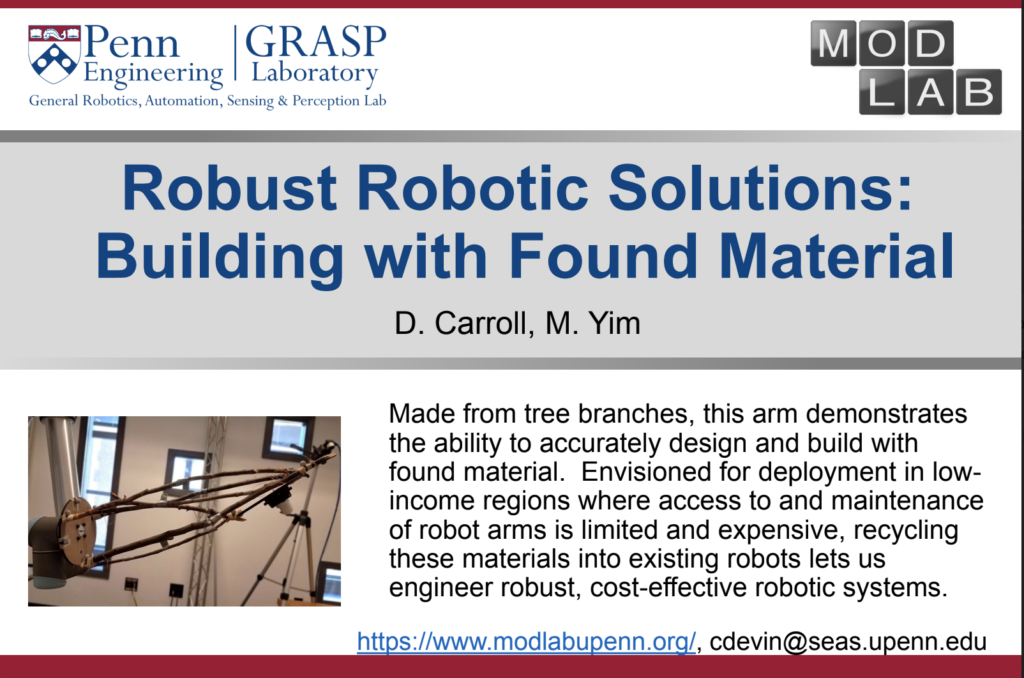
24 – Building with Found Material