
Text by Jillian Mallon
One benefit of the GRASP Laboratory being an interdisciplinary research center within the School of Engineering and Applied Sciences is the wide variety of disciplines that each lab member pursues. While some research areas within robotics and engineering are well-trodden within the field, there are some that fall within a smaller niche. One of GRASP’s PhD students, Zoe Cooperband (she/they), has focused on such a specific topic that is not only unique among GRASP members, but even to a conference that accepted and awarded her paper.
Cooperband, a PhD student in Penn’s Electrical and Systems Engineering (ESE) department advised by ESE and Mathematics Professor Robert Ghrist, conducts work in the GRASP Lab that leans heavily toward the mathematical and kinematical side of engineering. Last year, Cooperband submitted their first complete research paper, “Towards Homological Methods in Graphic Statics,” to the International Association for Shell and Spatial Structures (IASS) 2023 Symposium. Not only was the paper accepted, but it was awarded a Hangai Prize.
IASS is a non-profit organization of architects and engineers focused on the advancement of research on lightweight structural systems. The organization has awarded the Hangai Prize annually since 2001 to young contributors to the field of shell and spatial structures who submit their papers to the IASS Symposium.
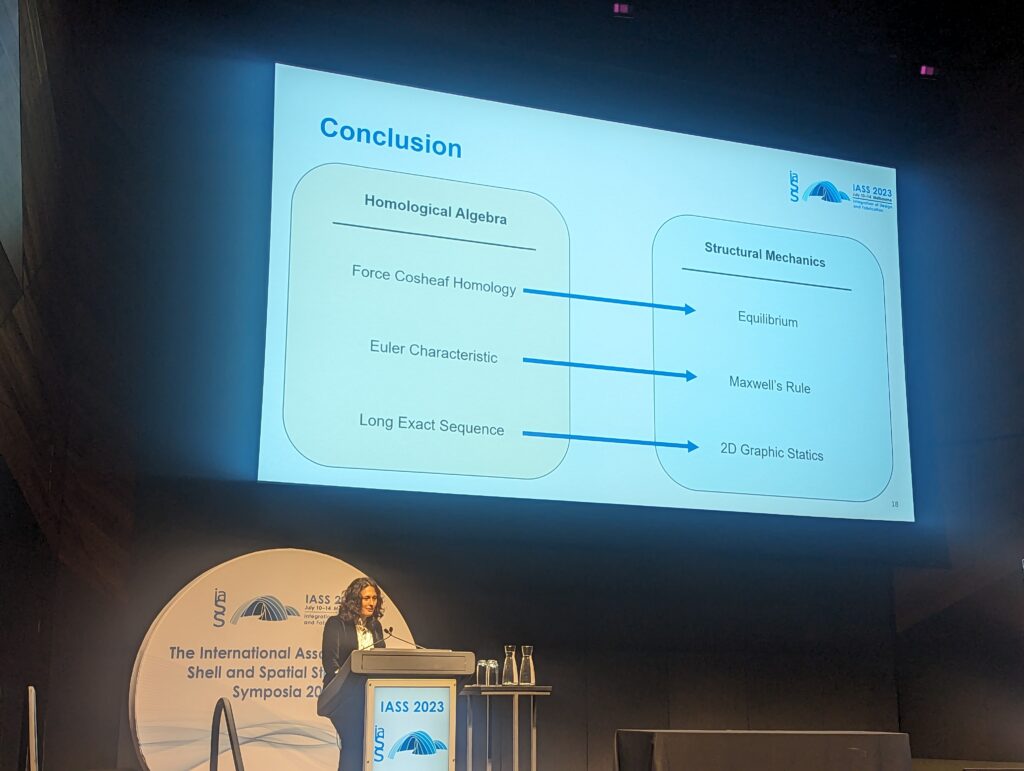
The paper that Cooperband submitted described a discovery that she made while viewing truss mechanics through the lenses of algebraic topology combined with graphic statics. “One of the applications of this mathematical theory that I’ve been working on called cellular sheaves is both in kinematics and in structures like trusses” Cooperband explained. “This paper was describing a duality in truss mechanics. The main scholars who are aware and familiar with this truss duality, duality of structures, they publish at IASS.”
Cooperband’s interest in this subject started while studying civil and structural engineering as an undergraduate student. “That topic was fresh in my mind, and when I was learning the mathematics of sheaf theory, I discovered that I could combine the two,” they remembered.
The IASS 2023 Symposium was held in Melbourne, Australia from July 10th to 14th. Despite some mild stage fright, Cooperband gave a plenary talk regarding her winning paper at the conference that intrigued many attendees. “I was a little worried because mine is probably the most abstract talk in the whole conference,” Cooperband admitted. “It was a lot of mathematics that I think is new to the field. I’m using methods from algebraic topology in civil engineering and that’s never really been done before in this way.”
The unique presentation intrigued a few audience members enough to approach Cooperband to discuss her findings in more detail and even plan collaborations. “I was introduced to origami kinematics at this conference. I met with a few researchers who do origami research and started a collaboration with them just from a few conversations,” Cooperband said. “The sheaf theory that I’ve been working on is very general, so I think that it could be used in other environments.”

Cooperband is still actively collaborating with some of the connections that they made at IASS 2023. In fact, almost a year since submitting their paper to the conference, they are still collaborating on a paper with a faculty member at the University of Tokyo on origami kinematics. Since IASS 2023 provided such a rewarding experience, Cooperband plans to submit a paper in collaboration with structural engineers in the UK to the IASS 2024 conference at ETH Zurich in Switzerland.
“I’d say the best thing that I got out of the conference was this collaboration and talking to other professors,” said Cooperband, “I’m in a small pond in UPenn but it was nice to meet these other people whose papers I have been referencing and reading.”