MINNEAPOLIS—Tiny robots that swim through our blood to deliver drugs or hunt down pathogens have been a staple of science fiction for decades. Although still distant, that vision is a step closer to reality now that electrical engineers have unveiled swimming microrobots smaller than grains of sand with enough computing power to perform a simple task on their own—rather than being constantly guided by external signals.
“It’s awesome,” says Daniel Goldman, a physicist at the Georgia Institute of Technology who specializes in larger robots that mimic animals. He was not involved in the work, which was reported this week here at a meeting of the American Physical Society. “Clearly, they’re putting together infrastructure so that one can start to make potentially autonomous, microscale robots.”
Realizing the ambition of autonomous microrobots has been difficult for several reasons, says Marc Miskin, an electrical engineer at the University of Pennsylvania (UPenn) whose group created the new bots. Making a microrobot autonomous requires incorporating some sort of computer, and only in about 2020 did the size of the smallest computer sink below 1 millimeter, Miskin says. “Computing systems were just a little too big until just 5 or 6 years ago,” he says. Moreover, making the microelectronics mesh with the robot’s mechanical systems is difficult, as is getting the whole thing to run on miniscule amounts of power.
To overcome these obstacles, Miskin and his colleagues first had to obtain a microscopic computer. They turned to David Blaauw, an electrical engineer and collaborator at the University of Michigan who produced a microprocessor chip that measures roughly 100 micrometers wide and contains a mere 128 bits of programmable memory.
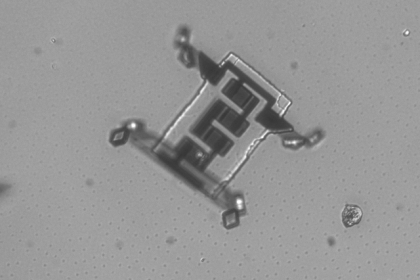
Next, Maya Lassiter, an electrical engineer at UPenn, and colleagues took a wafer containing thousands of copies of the processor and built a small army of robots on top of them. After depositing more materials on the wafer, Lassiter used standard lithography techniques to etch out the other parts of the robots. Each is a rectangle about 300 micrometers long and 200 micrometers wide, roughly the size of a paramecium. Many microrobots walk around on dry surfaces using tiny legs. However, those ultrathin appendages are difficult to make and wear out within a few weeks. So, Lassiter and Miskin instead designed a swimming microrobot that has no moving parts.
The little gizmos swim in a solution of dilute hydrogen peroxide in a shallow dish on the stage of a microscope. Instead of flippers, a robot has an electrode on each corner. Setting the two electrodes on any side of the robot to different voltages produces an electric field pointing from one electrode to the other. The field pushes the slightly ionic fluid one way and propels the robot in the opposite direction, toward the higher voltage electrode. By varying the voltages on the electrodes, researchers can make the robot move forward or backward, slide sideways, turn, or even twirl. What’s more, shorn of delicate limbs, the robots keep swimming for up to 6 months. “It was a big surprise that just simplifying this makes it last much longer than we anticipated,” Lassiter says.
For power, the robot relies on a tiny solar cell, which soaks up light from the microscope. Because of the simplicity of the 128-bit microchip, the robot runs on a mere 75 nanowatts—a couple thousandths as much power as is consumed by a modern pacemaker.
Finally, the team put the little machines to work. Before setting them loose, the researchers programmed them via a sequence of light flashes. The robots have a simple temperature sensor, and the researchers instructed them to measure the temperature of the surrounding fluid and telegraph the value back. Over the span of a few seconds, a robot would dance in a herky-jerky fashion, programmed so that its stops and starts would spell out as a binary number the temperature in degrees Celsius. “The robot motion is, in fact, the data,” Lassiter told the meeting. The researchers confirmed the robots worked as programmed by varying the temperature and comparing the readouts with the values from a macroscopic thermometer placed in the solution.
The experiment is just a first step, Goldman notes. Right now, the machines swim in a clean 2D environment, the microrobotic equivalent of the kiddie pool, he says. To be more useful, they’ll have to navigate the much messier 3D real world, he says. “It’s going to be a lot of fun to watch [the researchers] confront the challenges of moving in complex, microscale environments.”
Lassiter says the team has other ambitions, too. Electrodes can also sense electric fields, which could enable the robots to communicate with one another and function cooperatively. “That communication between robots will require a redesign,” she says. “So that’s what we’re interested in now.”