Learning and Leveraging Features in Flow – Like Environments to Improve Situational Awareness
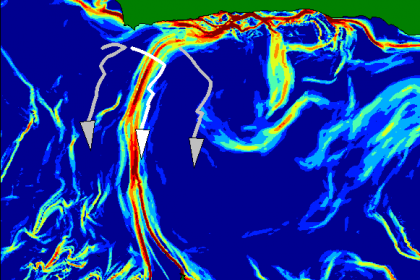
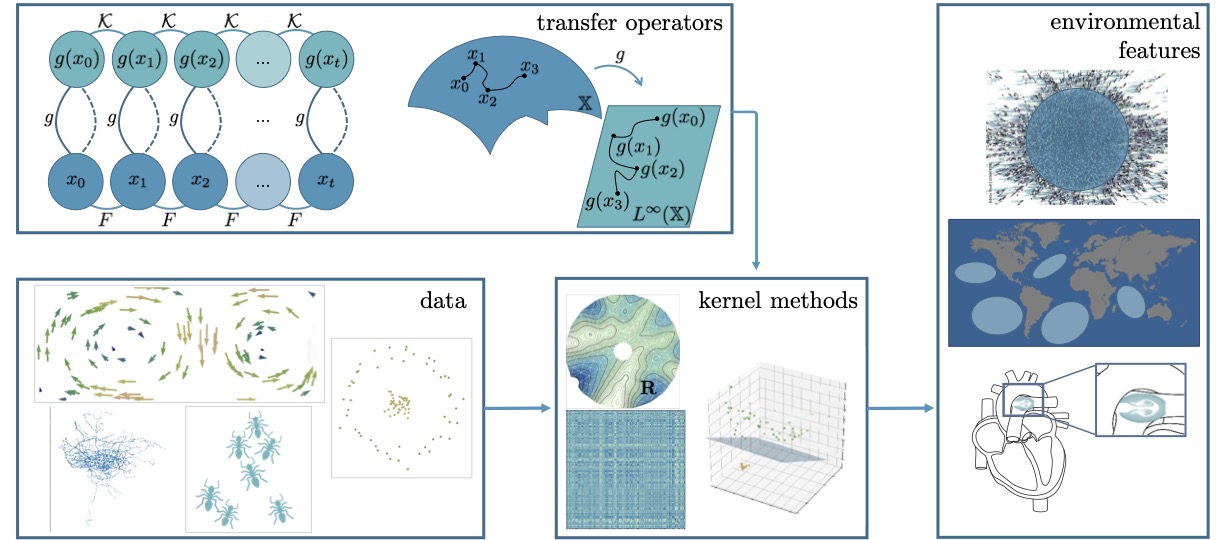
This paper studies how global dynamics and knowledge of high-level features can inform decision-making for robots in flow-like environments. Specifically, we investigate how coherent sets, an environmental feature found in these environments, inform robot awareness within these scenarios. Video Here