Haptography
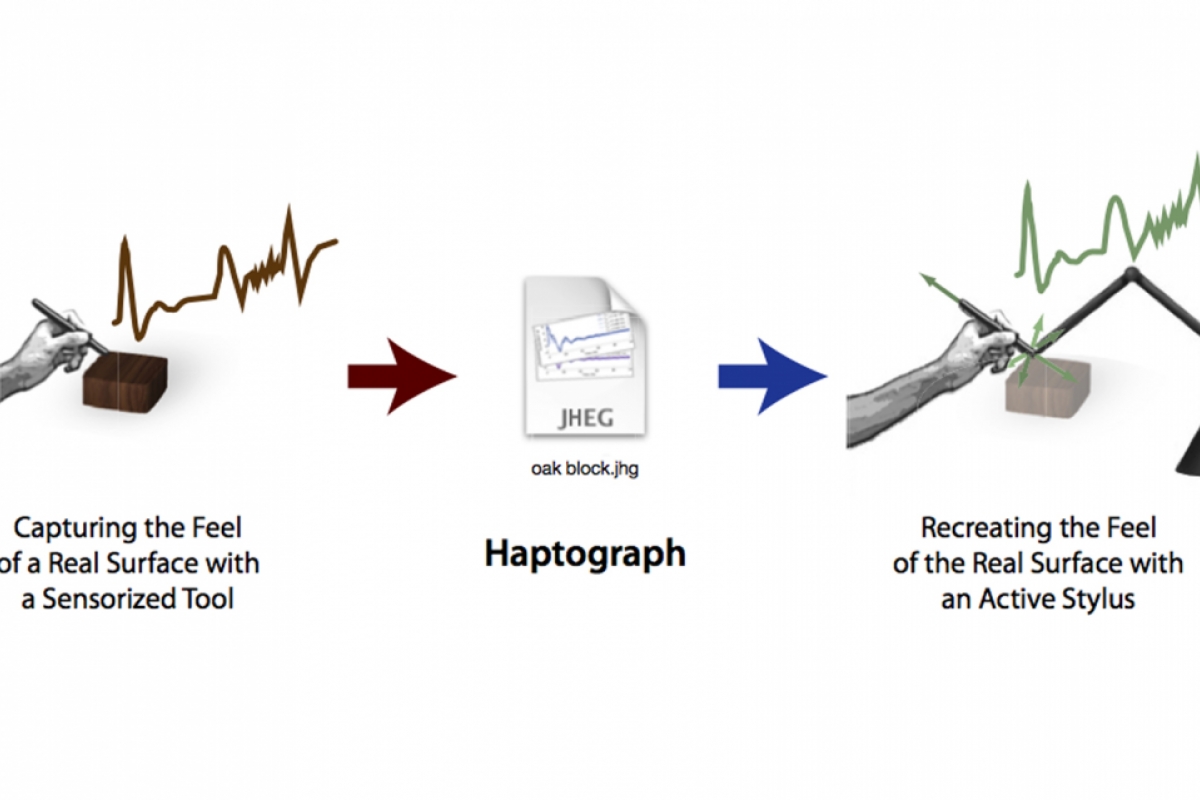
Haptography, like photography in the visual domain, enables an individual to quickly record the haptic feel of a real object and reproduce it later for others to interact with in a variety of contexts. Particular positive ramifications of establishing the approach of haptography are to let doctors and dentists create haptic records of medical afflictions such as a decayed tooth surface to assist in diagnosis and patient health tracking; to improve the realism and consequent training efficacy of haptic surgical simulators and other computer-based education tools; to allow a wide range of people, such as museum goers and online shoppers, to touch realistic virtual copies of valuable items; to facilitate a haptographic approach to low-bandwidth and time-delayed teleoperation, as found in space exploration; and to enable new insights on human and robot touch capabilities.
The primary hypothesis of this research is that the feel of tool-mediated contact with real and virtual objects is directly governed by the high-frequency accelerations that occur during the interaction, as opposed to the low-frequency impedance of the contact. Building on our knowledge of the human haptic sensory system, our approach uses measurement-based mathematical modeling to derive perceptually relevant haptic surface models and dynamically robust haptic display paradigms, which have been tested via both experimental validation and human-subject studies.